3. 例程编译和调用方法
📋 目录
SDK 提供四个示例程序,位于 psi-air-glove-SDK/psi-air-glove-SDK/python_sdk/examples/ 目录。
3.1 例程列表
| 例程名称 | 文件 | 功能说明 |
|---|---|---|
| 基础用法 | basic_usage.py | 演示连接、读取 22 路关节数据、断开连接 |
| 高级用法 | advanced_usage.py | 归一化与角度换算、统计信息、CSV 数据记录 |
| LRA触觉反馈 | lra_play_example.py | 线性马达波形与振幅控制(Modbus0xB0) |
| 指尖可视化 | test_fingertip_visualizer.py | MuJoCo 实时显示指尖位姿与坐标系 |
3.2 例程运行方法
运行前建议已在 python_sdk 目录执行 pip install -e .。
3.2.1 基础用法示例
bash
cd psi-air-glove-SDK/psi-air-glove-SDK/python_sdk/examples
# 运行基础示例(指定串口)
python3 basic_usage.py /dev/ttyACM0
# 自定义波特率
python3 basic_usage.py /dev/ttyACM0 500000
# Windows 系统
python basic_usage.py COM31输出示例:
==================================================
PSI Glove SDK - 基础使用示例
==================================================
串口: /dev/ttyACM0
波特率: 115200
==================================================
[INFO] 正在连接到设备...
[INFO] 连接成功!
[INFO] 开始读取数据 (按Ctrl+C退出)...
--- 帧 #0 ---
拇指: 2048, 1856, 2304, 1792, 2176, 1920
食指: 1920, 2240, 1664, 2112
中指: 2304, 1856, 2048, 1792
无名指: 1920, 2176, 1664, 2048
小指: 2240, 1856, 2304, 1920
--- 帧 #10 ---
拇指: 2052, 1860, 2308, 1796, 2180, 1924
...拇指为 6 路关节,其余四指各 4 路;数值为 12 位 ADC(0–4095)。按 Ctrl+C 退出后打印帧率统计。
3.2.2 高级用法示例
bash
# 运行高级示例
python3 advanced_usage.py /dev/ttyACM0
# 自定义波特率
python3 advanced_usage.py /dev/ttyACM0 500000
# 启用 CSV 数据记录(第三个参数为 --log)
python3 advanced_usage.py /dev/ttyACM0 115200 --log输出示例:
==================================================
PSI Glove SDK - 高级使用示例
==================================================
串口: /dev/ttyACM0
波特率: 115200
数据记录: 启用
==================================================
[INFO] 正在连接...
[INFO] 连接成功!
--- 帧 #0 ---
拇指关节角度:
关节 0: 45.2° (归一化: 0.512, 原始: 2048)
关节 1: 38.1° (归一化: 0.431, 原始: 1856)
...
==================================================
统计信息 (拇指指尖关节):
样本数: 1200 | 最小: 1800 | 最大: 2300 | 平均: 2050.3
==================================================启用 --log 时,会在当前目录生成 psi_glove_data_YYYYMMDD_HHMMSS.csv。
3.2.3 LRA 触觉示例
bash
python3 lra_play_example.py COM3 115200
python3 lra_play_example.py /dev/ttyACM0 921600可选参数:--slave(Modbus 从机地址)、--step-sec(每档保持时间)、--amp-max(振幅上限,默认 64)。
示例逻辑:拇指出厂波形,振幅从 1 递增到 amp_max;mode=0 关闭该指马达。
3.2.4 指尖可视化示例
依赖:mujoco、numpy、ruamel.yaml,以及 URDF(开发态在 SynGlove_Air_URDF/,离线 wheel 在 psi_glove_sdk/resources/)。
bash
pip install mujoco numpy ruamel.yaml
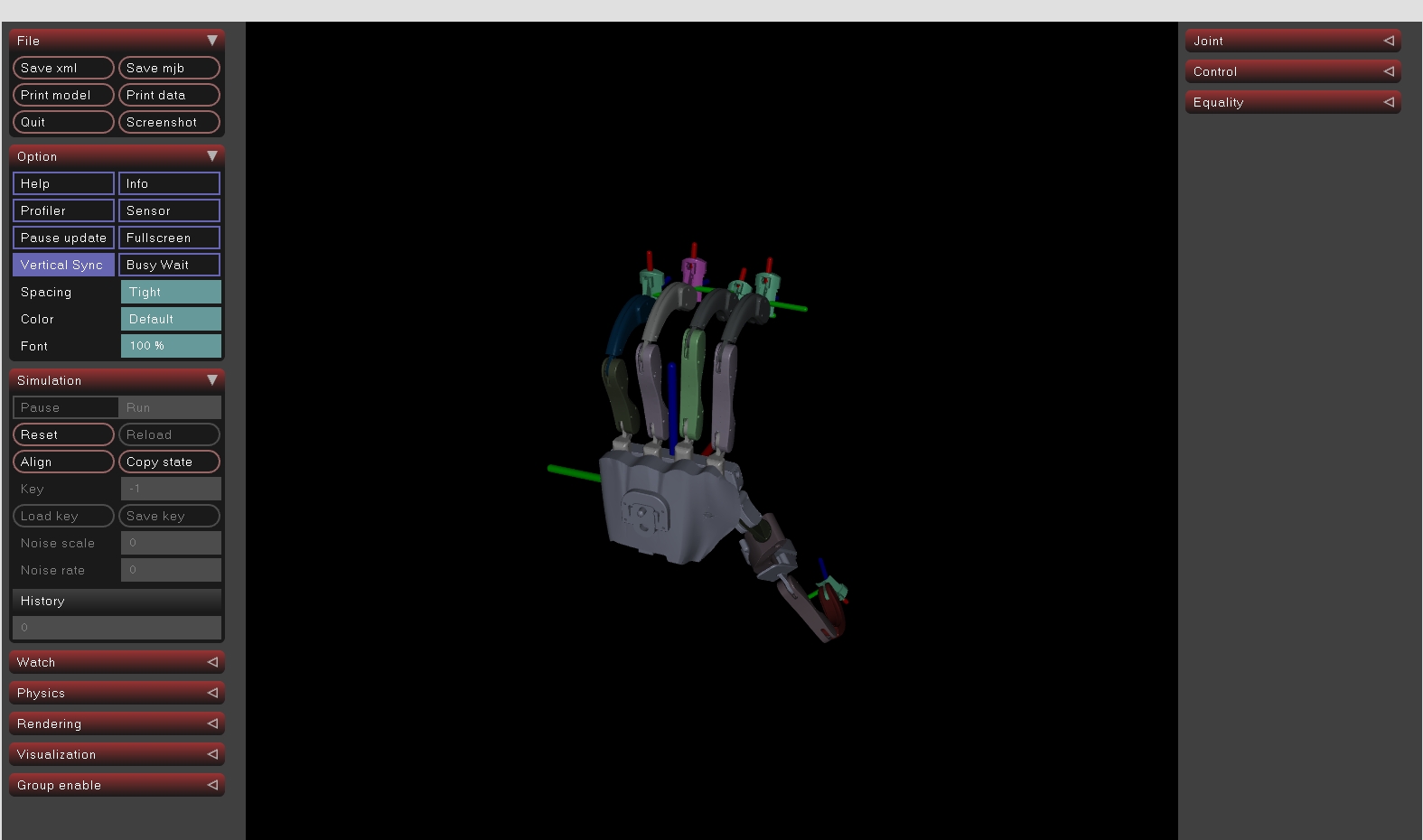
python3 test_fingertip_visualizer.py -p /dev/ttyACM0 -b 115200 -H right启动 MuJoCo 窗口,实时显示五指指尖坐标系;终端周期性打印 URDF 关节角与指尖位姿矩阵。
效果展示:
3.3 关节数据说明(22 路)
StatusMessage 包含 22 个关节 ADC 值(12 位,0–4095):
| 手指 | 关节数 | joints 索引 | 属性访问 |
|---|---|---|---|
| 拇指 | 6 | 0–5 | status.thumb |
| 食指 | 4 | 6–9 | status.index |
| 中指 | 4 | 10–13 | status.middle |
| 无名指 | 4 | 14–17 | status.ring |
| 小指 | 4 | 18–21 | status.pinky |
拇指 6 路顺序:tip, mid, back, back2, side, rotate。其余四指:tip, mid, back, side。